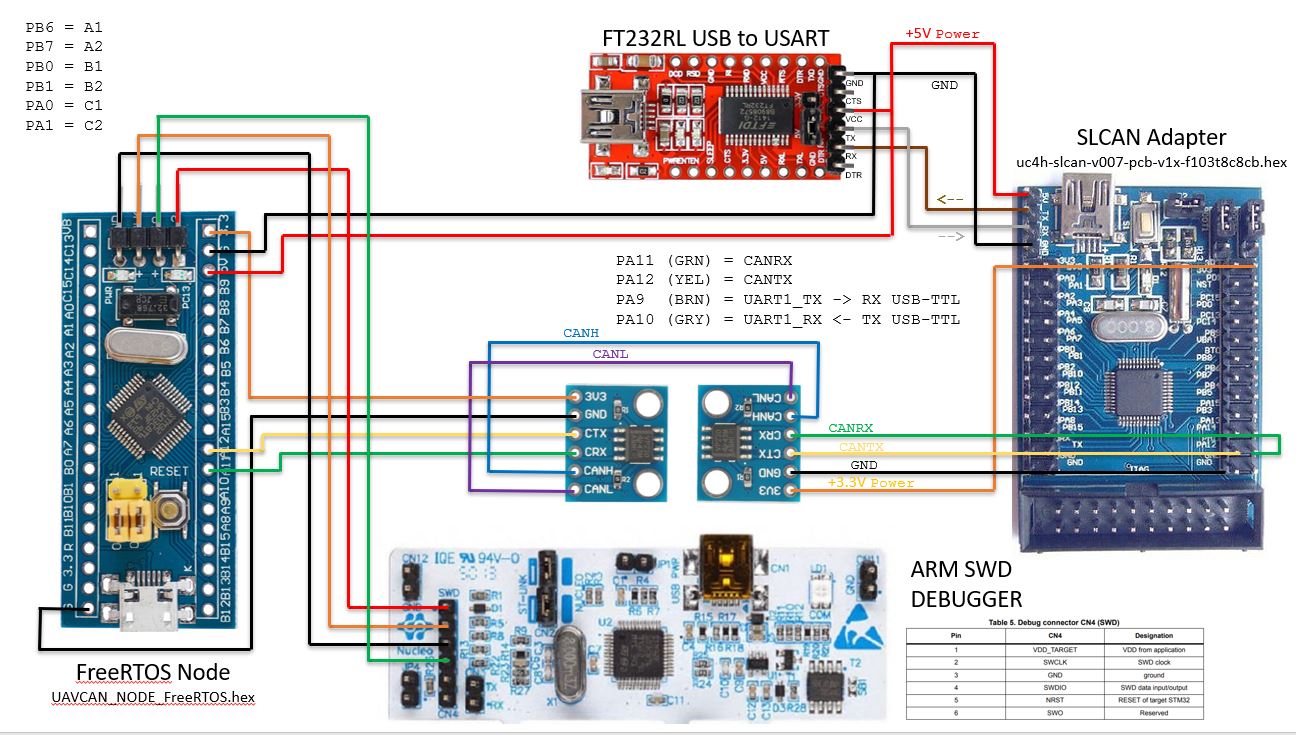
Thanks for the help form pavel.kirienko and Alexander I have been researching libcanard for a while and finally it is successful. the function of my program is not too much just NODE_STATUS and RC_PWM subscriber and publisher of some sin value. It is not complete I will keep maintain and make better. of course I will keep it simple as possible as I can . in this program FreeRTOS has been used. so you can make more things you want . The hardware I choice on of the most ordinary chip which is STM32F103C8 and TJA1051 . The circuit is also simple.the project are as follow .I wish my project could help more people which is learning and interesting on libcanard .
https://github.com/skyyuzhang/UAVCAN_NODE_FreeRTOS
2 Likes
Wow, thanks so much. I’ve been working slowly towards this very thing! I’ve been able to build hex/elf successfully with “make” command right out of a git clone. I have the STM32F103C8 and TJA1051 hardware on hand, I will test it out and report back.
I will make more different funtcion using libcanard on many different chip. not just only stm32f103c8. As for it is bigger for some modules
Hello Skyyuzhang,
Thanks again for sharing your working project on GitHub. I built it up and tested on inexpensive STM32F103s with known good SN65HVD230 adapters and had immediate success. Compiled with gcc 7.3.0 on Windows. I’ve documented it here RC Groups - View Single Post - DIY UAVCAN: STM32 (F1, F3) step-by-step
Thanks so much,
George
2 Likes
Hi,
Thanks for this demo. I have been unsuccessfully trying to get any libcanard code to function .
I built your code by imported it to ac6 (sw4stm) as a makefile project.
That worked ok but I could not debug it, so I created another sw4stm project from your .ioc file and changed to sw4stm instead of makefile. I copied in the code and then excluded files not used. It build and I could debug it.
However when I connect it to a zubax babel with uavcan gui bus monitor , I do not see any messages at all ,and it gets stuck in the tx loop and never returns from there. I had the same problem with the zubax babel running libcanard tutorials. What is an easy way to test this code? I have tried to sets of source and 2 different hardware boards always with the same result. I have test 2 zubax boards with uavcan gui together and they see each others node status messages fine. Is there a binary or somehting that is known to work that I can test with to try and narrow this down?
Thanks,
Kent