Hello,
I am trying to implement libuavcan on stm32f103tb6 (36 pins) mcu using cubemx generated project with freertos on system workbench IDE.
Just for simplicity I am using generated project and IDE gives fast conversion to C++.
Similar project with the same mcu on chibios working properly, but with generated project and freertos it’s not working.
Maybe someone could help to solve issues ?
it stucks on can.init phase
if (!waitMsrINakBitStateChange(false))
{
UAVCAN_STM32_LOG("MSR INAK not cleared");
can_->MCR = bxcan::MCR_RESET;
return -ErrMsrInakNotCleared;
}
at uc_stm32_can.cpp
my main.cpp
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2019 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under Ultimate Liberty license
* SLA0044, the "License"; You may not use this file except in compliance with
* the License. You may obtain a copy of the License at:
* www.st.com/SLA0044
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "cmsis_os.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <uavcan/uavcan.hpp>
#include <uavcan_stm32/uavcan_stm32.hpp>
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
CAN_HandleTypeDef hcan;
osThreadId defaultTaskHandle;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_CAN_Init(void);
void StartDefaultTask(void const * argument);
/* USER CODE BEGIN PFP */
/*
#define DEBUG_BUFFER_SIZE (256)
#define DEBUG_TIMEOUT (1000)
osSemaphoreId DEBUG_TX_completeID;
osSemaphoreDef(DEBUG_TX_complete);
uint8_t DEBUG_TX_Buffer[DEBUG_BUFFER_SIZE] = {0}; //!< Debug buffer.
// Private functions ---------------------------------------------------------
bool DEBUG_Init(void)
{
if ((DEBUG_TX_completeID = osSemaphoreCreate(osSemaphore(DEBUG_TX_complete), 1)) == NULL)
{
return false;
}
return true;
}
void DEBUG_Printf(const char *fmt, ...)
{
uint16_t i = 0;
va_list args;
if (osSemaphoreWait(DEBUG_TX_completeID, 1000) == osOK)
{
va_start(args, fmt);
i = vsnprintf((char*) DEBUG_TX_Buffer, DEBUG_BUFFER_SIZE - 1, fmt, args);
DEBUG_TX_Buffer[i] = 0x00;
uint16_t retry = 4096;
while ((retry--)&&(HAL_UART_Transmit(&huart3, &DEBUG_TX_Buffer[0], strlen((char*)&DEBUG_TX_Buffer[0]), 0xFFF) != HAL_OK));
va_end(args);
osSemaphoreRelease(DEBUG_TX_completeID);
}
return;
}
*/
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
constexpr unsigned NodePoolSize = 2048;
uavcan_stm32::CanInitHelper<> can;
uavcan::Node<NodePoolSize>& getNode() {
static uavcan::Node<NodePoolSize> node(can.driver, uavcan_stm32::SystemClock::instance());
return node;
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
uint32_t value = 1000000;
int res = 0;
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_CAN_Init();
/* USER CODE BEGIN 2 */
//DEBUG_Init();
res = can.init(value);
/*
getNode().setName("org.kmti.gmm_controler");
getNode().setNodeID(1);
if (getNode().start() < 0) {
//DEBUG_Printf("UAVCAN init fail\r\n");
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_6);
while(1);
}
getNode().setModeOperational();
*/
/* USER CODE END 2 */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* Create the thread(s) */
/* definition and creation of defaultTask */
osThreadDef(defaultTask, StartDefaultTask, osPriorityNormal, 0, 128);
defaultTaskHandle = osThreadCreate(osThread(defaultTask), NULL);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
/* Start scheduler */
osKernelStart();
/* We should never get here as control is now taken by the scheduler */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV2;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief CAN Initialization Function
* @param None
* @retval None
*/
static void MX_CAN_Init(void)
{
/* USER CODE BEGIN CAN_Init 0 */
/* USER CODE END CAN_Init 0 */
/* USER CODE BEGIN CAN_Init 1 */
/* USER CODE END CAN_Init 1 */
hcan.Instance = CAN1;
hcan.Init.Prescaler = 2;
hcan.Init.Mode = CAN_MODE_NORMAL;
hcan.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan.Init.TimeSeg1 = CAN_BS1_12TQ;
hcan.Init.TimeSeg2 = CAN_BS2_5TQ;
hcan.Init.TimeTriggeredMode = DISABLE;
hcan.Init.AutoBusOff = DISABLE;
hcan.Init.AutoWakeUp = DISABLE;
hcan.Init.AutoRetransmission = DISABLE;
hcan.Init.ReceiveFifoLocked = DISABLE;
hcan.Init.TransmitFifoPriority = DISABLE;
if (HAL_CAN_Init(&hcan) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN CAN_Init 2 */
/* USER CODE END CAN_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6|GPIO_PIN_7, GPIO_PIN_RESET);
/*Configure GPIO pins : PB6 PB7 */
GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/* USER CODE BEGIN Header_StartDefaultTask */
/**
* @brief Function implementing the defaultTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void const * argument)
{
/* USER CODE BEGIN 5 */
/* Infinite loop */
for(;;)
{
/*
if (getNode().spin(uavcan::MonotonicDuration::fromMSec(500)) < 0) {
//DEBUG_Printf("UAVCAN spin fail\r\n");
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_6);
//while(1);
}
*/
//osDelay(1);
}
/* USER CODE END 5 */
}
/**
* @brief Period elapsed callback in non blocking mode
* @note This function is called when TIM1 interrupt took place, inside
* HAL_TIM_IRQHandler(). It makes a direct call to HAL_IncTick() to increment
* a global variable "uwTick" used as application time base.
* @param htim : TIM handle
* @retval None
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
/* USER CODE BEGIN Callback 0 */
/* USER CODE END Callback 0 */
if (htim->Instance == TIM1) {
HAL_IncTick();
}
/* USER CODE BEGIN Callback 1 */
/* USER CODE END Callback 1 */
}
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
chip.h
#ifndef CHIP_H
#define CHIP_H
#include <stm32f1xx.h>
#define STM32F1XX
#define STM32_PCLK1 (36000000ul) // 32 MHz
#define STM32_TIMCLK1 (72000000ul) // 64 MHz
//#define CAN1_TX_IRQHandler CAN1_TX_IRQHandler //redefined
//#define CAN1_RX0_IRQHandler CAN1_RX0_IRQHandler //redefined
#define CAN1_RX1_IRQHandler CAN1_RX1_IRQHandler
#endif
For new user I can’t upload whole project, so if are need some more info ask for it


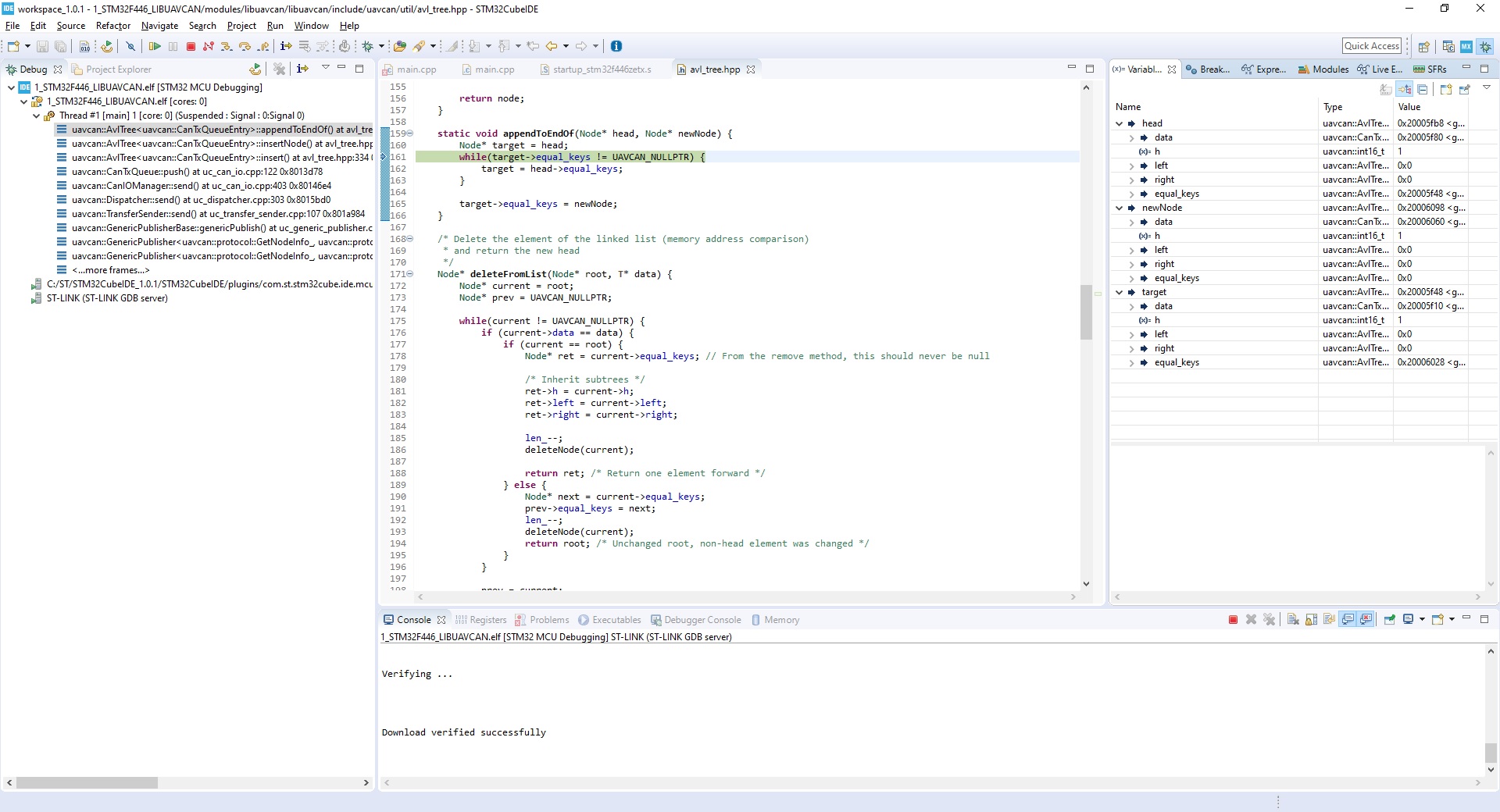
 then debugging feature was fully solved. it happens what it stuck on AVLtree loop. So my colleague purposed to take older version. After “git checkout 36701b” everything began to work. A lot time was spent on finding so simple solution. I will push later to my git and provide link for examples, but I need to find additional solution and for this i will create next topic.
then debugging feature was fully solved. it happens what it stuck on AVLtree loop. So my colleague purposed to take older version. After “git checkout 36701b” everything began to work. A lot time was spent on finding so simple solution. I will push later to my git and provide link for examples, but I need to find additional solution and for this i will create next topic.