The 107-Arduino-UAVCAN library is now at a point where it can be used to make small working projects and here is an example how to do it.
This example uses unregulated Subject-IDs. Register API is not yet implemented in the library so the Subject-IDs are coded in the Arduino sketch. The example generates a Heartbeat message every second.
My example uses an Arduino MKR WiFi 1010 with a MKR CAN Shield.
The Arduino has a builtin LED and two more LEDs are connected to pin 2 and 5. A tactile switch is connected to pin 4. Here is a photo:
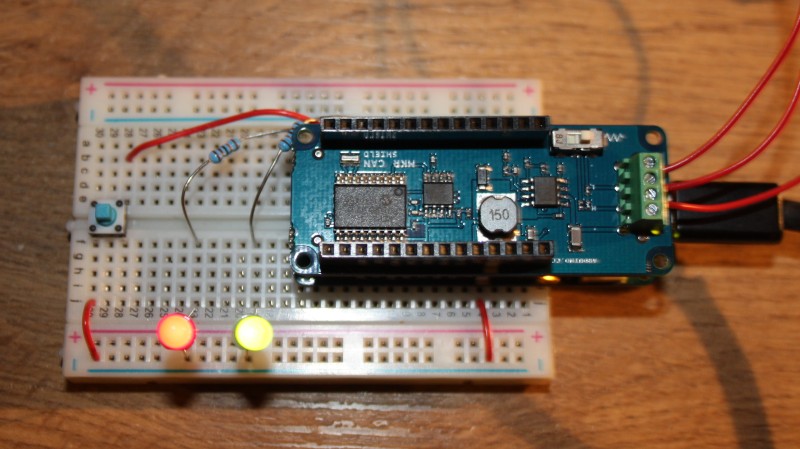
At the moment the library only supports the uavcan.primitive.scalar.Bit.1.0. The Arduino sketch subscribes to three Subject-IDs 1620, 1621 and 1622. Publishing to these Subject-IDs turns the LEDs on the Arduino on and off.
This can be done using pyuavcan-cli.
switch LED on with
yakut -i 'CAN(can.media.socketcan.SocketCANMedia("can0",8),59)' pub 1620.uavcan.primitive.scalar.Bit.1.0 'value: true'
switch LED off with
yakut -i 'CAN(can.media.socketcan.SocketCANMedia("can0",8),59)' pub 1620.uavcan.primitive.scalar.Bit.1.0 'value: false'
use Subject-ID 1621 and 1622 for the other LEDs.
The example also publishes to two other Subject-IDs: 1623 and 1624
Subject-ID 1623 is published every second and the value is toggled every second.
Subject-ID 1624 is connected to the switch at pin 4 and is transmitted every time the state of the switch changes.
These messages can also be received using pyuavcan:
yakut -i 'CAN(can.media.socketcan.SocketCANMedia("can0",8),59)' sub 1624.uavcan.primitive.scalar.Bit.1.0
The output should be like:
---
1624:
_metadata_:
timestamp:
system: 1609452862.629312
monotonic: 34714.947701
priority: nominal
transfer_id: 1
source_node_id: 13
value: false
---
1624:
_metadata_:
timestamp:
system: 1609452866.743069
monotonic: 34719.061459
priority: nominal
transfer_id: 2
source_node_id: 13
value: true
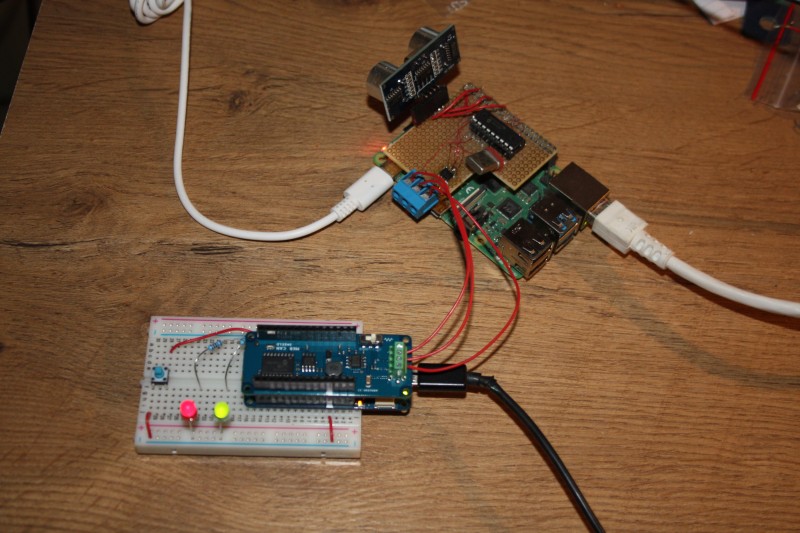
In my test setup pyuavcan is running on a Raspberry Pi. It is connected to the CAN bus using a MCP2515. Here is a photo of the setup:
Here is the full source code of the sketch:
/*
* This example creates a UAVCAN node. The builtin LED can be switched on and off using UAVCAN.
* It also shows periodic transmission of a UAVCAN heartbeat message via CAN.
*
* switch built in LED on with
* pyuavcan pub 1620.uavcan.primitive.scalar.Bit.1.0 'value: true' --tr='CAN(can.media.socketcan.SocketCANMedia("can0",8),59)'
*
* switch built in LED off with
* pyuavcan pub 1620.uavcan.primitive.scalar.Bit.1.0 'value: false' --tr='CAN(can.media.socketcan.SocketCANMedia("can0",8),59)'
*
* Hardware:
* - Arduino MKR family board, e.g. MKR VIDOR 4000
* - Arduino MKR CAN shield
*/
/**************************************************************************************
* INCLUDE
**************************************************************************************/
#include <SPI.h>
#include <ArduinoUAVCAN.h>
#include <ArduinoMCP2515.h>
/**************************************************************************************
* DEFINES
**************************************************************************************/
#define LED1 2
#define LED2 5
#define SWITCH 4
/**************************************************************************************
* CONSTANTS
**************************************************************************************/
static int const MKRCAN_MCP2515_CS_PIN = 3;
static int const MKRCAN_MCP2515_INT_PIN = 7;
static CanardPortID const BIT_PORT_ID = 1620U;
static CanardPortID const BIT_PORT_ID1 = 1621U;
static CanardPortID const BIT_PORT_ID2 = 1622U;
static CanardPortID const BIT_PORT_ID3 = 1623U;
static CanardPortID const BIT_PORT_ID4 = 1624U;
/**************************************************************************************
* FUNCTION DECLARATION
**************************************************************************************/
void spi_select ();
void spi_deselect ();
uint8_t spi_transfer (uint8_t const);
void onExternalEvent ();
bool transmitCanFrame (CanardFrame const &);
void onReceiveBufferFull(CanardFrame const &);
void onBit_1_0_Received (CanardTransfer const &, ArduinoUAVCAN &);
void onBit_1_0_Received1 (CanardTransfer const &, ArduinoUAVCAN &);
void onBit_1_0_Received2 (CanardTransfer const &, ArduinoUAVCAN &);
/**************************************************************************************
* GLOBAL VARIABLES
**************************************************************************************/
ArduinoMCP2515 mcp2515(spi_select,
spi_deselect,
spi_transfer,
micros,
onReceiveBufferFull,
nullptr);
ArduinoUAVCAN uavcan(13, transmitCanFrame);
Heartbeat_1_0 hb;
Bit_1_0<BIT_PORT_ID3> uavcan_bit3;
Bit_1_0<BIT_PORT_ID4> uavcan_bit4;
/**************************************************************************************
* SETUP/LOOP
**************************************************************************************/
void setup()
{
Serial.begin(9600);
while(!Serial) { }
/* Setup LED and initialize */
pinMode(LED_BUILTIN, OUTPUT);
digitalWrite(LED_BUILTIN, LOW);
pinMode(LED1, OUTPUT);
digitalWrite(LED1, LOW);
pinMode(LED2, OUTPUT);
digitalWrite(LED2, LOW);
pinMode(SWITCH, INPUT_PULLUP);
/* Setup SPI access */
SPI.begin();
pinMode(MKRCAN_MCP2515_CS_PIN, OUTPUT);
digitalWrite(MKRCAN_MCP2515_CS_PIN, HIGH);
/* Attach interrupt handler to register MCP2515 signaled by taking INT low */
pinMode(MKRCAN_MCP2515_INT_PIN, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(MKRCAN_MCP2515_INT_PIN), onExternalEvent, FALLING);
/* Initialize MCP2515 */
mcp2515.begin();
mcp2515.setBitRate(CanBitRate::BR_250kBPS);
mcp2515.setNormalMode();
/* Configure initial bit */
uavcan_bit3.data.value = false;
uavcan_bit4.data.value = false;
/* Configure initial heartbeat */
hb.data.uptime = 0;
hb = Heartbeat_1_0::Health::NOMINAL;
hb = Heartbeat_1_0::Mode::INITIALIZATION;
hb.data.vendor_specific_status_code = 0;
/* Subscribe to the reception of Bit message. */
uavcan.subscribe<Bit_1_0<BIT_PORT_ID>>(onBit_1_0_Received);
uavcan.subscribe<Bit_1_0<BIT_PORT_ID1>>(onBit_1_0_Received1);
uavcan.subscribe<Bit_1_0<BIT_PORT_ID2>>(onBit_1_0_Received2);
Serial.println("init finished");
}
void loop()
{
static bool a=0;
bool b;
b=digitalRead(SWITCH);
if(a!=b)
{
uavcan_bit4.data.value = b;
uavcan.publish(uavcan_bit4);
Serial.print("send bit: ");
Serial.println(b);
}
a=b;
/* Update the heartbeat object */
hb.data.uptime = millis() / 1000;
hb = Heartbeat_1_0::Mode::OPERATIONAL;
/* Publish the heartbeat once/second */
static unsigned long prev = 0;
unsigned long const now = millis();
if(now - prev > 1000) {
if(uavcan_bit3.data.value==true) uavcan_bit3.data.value=false;
else uavcan_bit3.data.value=true;
uavcan.publish(uavcan_bit3);
uavcan.publish(hb);
prev = now;
}
/* Transmit all enqeued CAN frames */
while(uavcan.transmitCanFrame()) { }
}
/**************************************************************************************
* FUNCTION DEFINITION
**************************************************************************************/
void spi_select()
{
digitalWrite(MKRCAN_MCP2515_CS_PIN, LOW);
}
void spi_deselect()
{
digitalWrite(MKRCAN_MCP2515_CS_PIN, HIGH);
}
uint8_t spi_transfer(uint8_t const data)
{
return SPI.transfer(data);
}
void onExternalEvent()
{
mcp2515.onExternalEventHandler();
}
bool transmitCanFrame(CanardFrame const & frame)
{
return mcp2515.transmit(frame);
}
void onReceiveBufferFull(CanardFrame const & frame)
{
uavcan.onCanFrameReceived(frame);
}
void onBit_1_0_Received(CanardTransfer const & transfer, ArduinoUAVCAN & /* uavcan */)
{
Bit_1_0<BIT_PORT_ID> const uavcan_led = Bit_1_0<BIT_PORT_ID>::deserialize(transfer);
if(uavcan_led.data.value)
{
digitalWrite(LED_BUILTIN, HIGH);
Serial.println("Received Bit0: true");
}
else
{
digitalWrite(LED_BUILTIN, LOW);
Serial.println("Received Bit0: false");
}
}
void onBit_1_0_Received1(CanardTransfer const & transfer, ArduinoUAVCAN & /* uavcan */)
{
Bit_1_0<BIT_PORT_ID1> const uavcan_led1 = Bit_1_0<BIT_PORT_ID1>::deserialize(transfer);
if(uavcan_led1.data.value)
{
digitalWrite(LED1, HIGH);
Serial.println("Received Bit1: true");
}
else
{
digitalWrite(LED1, LOW);
Serial.println("Received Bit1: false");
}
}
void onBit_1_0_Received2(CanardTransfer const & transfer, ArduinoUAVCAN & /* uavcan */)
{
Bit_1_0<BIT_PORT_ID2> const uavcan_led2 = Bit_1_0<BIT_PORT_ID2>::deserialize(transfer);
if(uavcan_led2.data.value)
{
digitalWrite(LED2, HIGH);
Serial.println("Received Bit2: true");
}
else
{
digitalWrite(LED2, LOW);
Serial.println("Received Bit2: false");
}
}