UAVCAN/UDP multicasting & IGMP
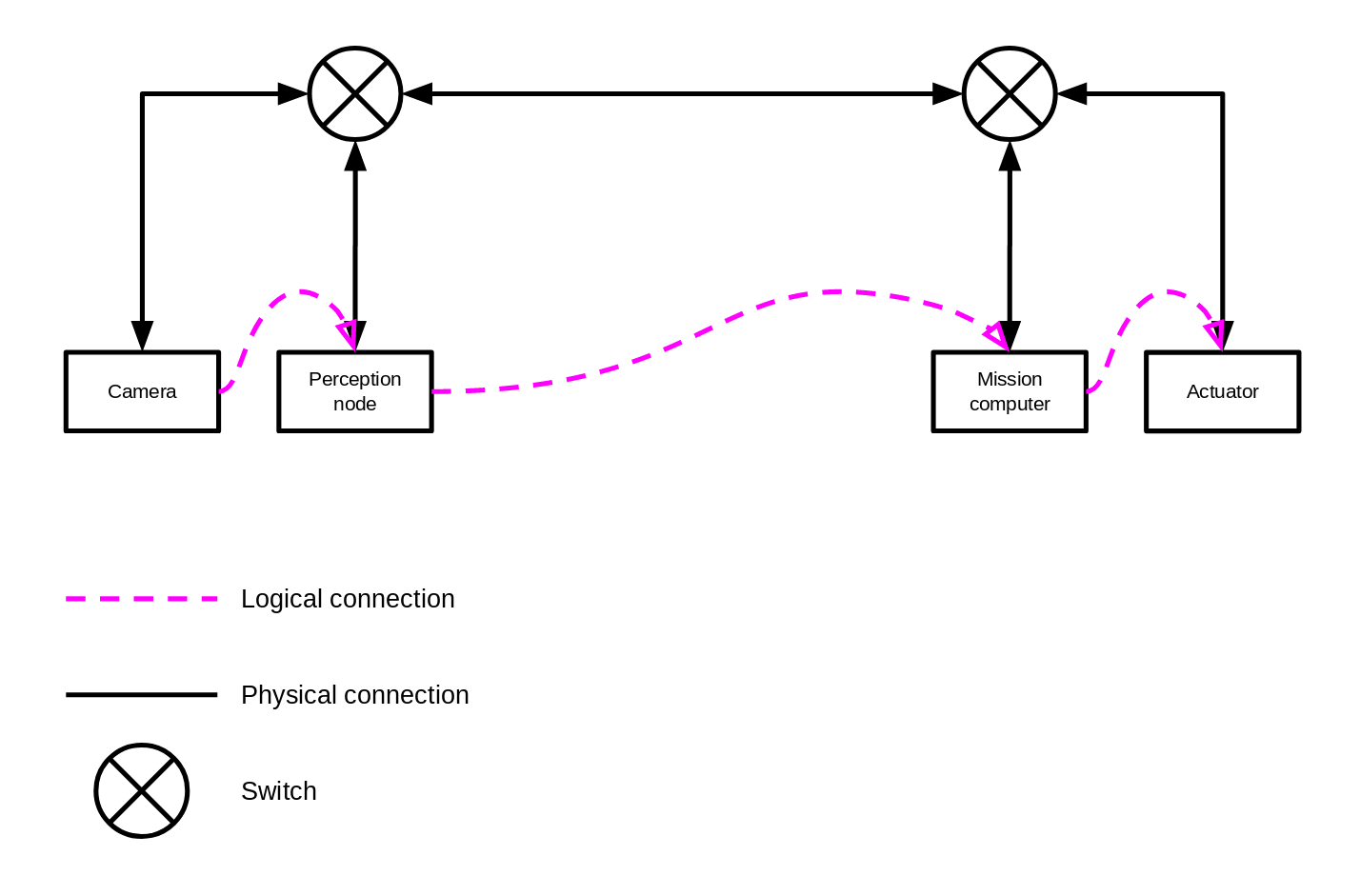
Last weekend I was working on my experimental UAVCAN-based Yukon backend PoC. While doing that, I ventured to review the idea of employing IP multicasting for the experimental UAVCAN/UDP transport instead of broadcasting (it was partly inspired by the realization that with the broadcast-based approach, there may be at most one network operating on the loopback interface). The original proposal (in the OP post here) closely resembles AFDX, where the switching logic is intended to be configured statically. Later, in “Stabilizing uavcan.node.port.List.0.1, introspection, and switched networks”, I briefly outlined the idea of an IMGP-like auto-configuration logic where the switch is to automatically construct the distribution tree by snooping on the port list messages published by network participants. Further inquiry into this subject revealed that the IMGP protocol itself does not appear to be inherently incompatible with real-time or functional safety requirements, and it is possible to replace its inherently dynamic behaviors with static pre-configuration if such is preferred in a highly deterministic setting.
It is worth pointing out that not all networking equipment provides full support for IMGP. It is common for simpler switching hardware to handle multicast traffic by simply rebroadcasting multicast packets into every output port, which is still technically compatible with the formal specification of IP multicast. This serves to demonstrate that a multicast-based solution can be considered as a special case of the original broadcast-based one and that in highly deterministic settings it is possible to intentionally disable the dynamic behaviors introduced by IGMP in favor of static configuration on the switch, similar to AFDX.
Therefore, the advantage of this updated multicast proposal is that it is capable of efficient utilization of the network bandwidth using standard COTS hardware without the need for any UAVCAN-specific traffic handling policies, while still being compatible with fully static configurations shall that be preferred. It should also be noted that the question of reliable delivery that frequently arises in relation to multicasting is addressed by 1. the basic assumption that the underlying transport network provides a guaranteed service level and 2. the deterministic data loss mitigation method can be applied to manage spurious data losses caused by external factors like interference.
This proposal is focused on IPv4 because I expect that the advantages of IPv6 are less relevant in an intravehicular setting. Nevertheless, due to the similarities between v4 and v6, it is trivial to port this proposal to IPv6 shall the need arise. The differences will be confined to the specific definitions of IP addresses and some related numbers, while the general principles will remain unchanged.
The changes introduced by this proposal affect only nodes that subscribe to UAVCAN subjects. There is no effect on request/response interactions (because they are inherently unicast), and there is virtually no effect on publications because per RFC 1112, in order to emit a multicast packet, a limited level-1 implementation without the full support of IGMP and multicast-specific packet handling policies is sufficient.
The proposed here scheme of mapping a UAVCAN data-specifier to a multicast IP address (and the reverse) is static and unsophisticated. This is possible because the UAVCAN transport layer model is in itself very simple and it utilizes only compact numerical entity identifiers (instead of, say, textual topic names).
Without the need to rely on explicit broadcasting, netmask becomes irrelevant for node configuration (per the original proposal it was necessary for deducing the subnet broadcast address). In the interest of simplification, the new approach is to treat the 16 least significant bits of the IP address as the node-ID, which does not necessarily imply that the entire 65536 addresses are admissible (earlier it has been proposed to limit the range of node-IDs to [0, 4095], that still holds). This is both machine- and human-friendly, especially with IPv6, where the least significant hextet simply becomes the node-ID.
The following 7 bits of the IPv4 address are used to differentiate independent UAVCAN/UDP transport networks sharing the same IP network (e.g., multiple UAVCAN/UDP networks running on localhost or on some physical network). This is similar to the domain identifier in DDS. For clarity, this 7-bit value will be referred to as the subnet-ID; it is not used anywhere else in the protocol other than in the construction of the multicast group address, as will be shown below. The remaining 9 bits of the IPv4 address are not used. The reason why the width is chosen to be specifically 7 and 9 bits will be provided below.
Schematically, the IPv4 address of a node is structured as follows:
xxxxxxxx.xddddddd.nnnnnnnn.nnnnnnnn
\________/\_____/ \_______________/
(9 bits) (7 bits) (16 bits)
ignored UAVCAN/UDP UAVCAN/UDP
subnet-ID node-ID
Then, in order to provide means for publishers and subscribers to find each other’s endpoints statically (as per UAVCAN core design goals, dynamic discovery is inadmissible) while not conflicting with other UAVCAN/UDP subnets, the multicast group address for a given subnet and subject-ID is constructed as follows:
fixed in this
Specification reserved
(5 bits) (3 bits)
____ _
/ \ / \
11101111.0ddddddd.000sssss.ssssssss
\__/ \_____/ \____________/
(4 bits) (7 bits) (13 bits)
IPv4 UAVCAN/UDP UAVCAN/UDP
multicast subnet-ID subject-ID
prefix
\_______________________/
(23 bits)
collision-free multicast
addressing limit of
Ethernet MAC for IPv4
From the most significant bit to the least significant bit, the components are as follows:
-
IPv4 multicast prefix is defined by RFC 1112.
-
The following 5 bits are set to 0b11110 by this Specification. The motivation is as follows:
-
Setting the four least significant bits of the most significant byte to 0b1111 moves the address range into the administratively-scoped range (239.0.0.0/8, RFC 2365), which ensures that there may be no conflicts with well-known multicast groups.
-
Setting the most significant bit of the second octet to zero ensures that there may be no conflict with reserved sub-ranges within the administratively-scoped range. The resulting range 239.0.0.0/9 is entirely ad-hoc defined.
-
Fixing the 5+4=9 most significant bits of the multicast group address ensures that the variability is confined to the 23 least significant bits of the address only, which is desirable because the IPv4 Ethernet MAC layer does not differentiate beyond the 23 least significant bits of the multicast group address (i.e., addresses that differ in the 9 MSb collide at the MAC layer, which is unacceptable in a real-time system) (RFC 1112 section 6.4). Without this limitation, an engineer deploying a network might inadvertently create a configuration that causes MAC-layer collisions which may be difficult to detect.
-
The following 7 bits (the least significant bits of the second octet) are used to differentiate independent UAVCAN/UDP networks sharing the same physical IP network. Since the 9 most significant bits of the node IP address are not represented in the multicast group address, nodes whose IP addresses differ only by the 9 MSb are not distinguished by UAVCAN/UDP. This limitation does not appear to be significant, though, because such configurations are easy to avoid. It follows that there may be up to 128 independent UAVCAN/UDP networks sharing the same IP subnet.
-
The following 16 bits define the data specifier:
- 3 bits reserved for future use.
- 13 bits represent the subject-ID as-is.
Publishers should use the TTL value of 16 by default, which is chosen as a sensible default suitable for any intravehicular network. Per RFC 1112, the default TTL is 1, which is unacceptable.
Examples
Node IP address: 01111111 00000010 00000000 00001000
127 2 0 8
Subject-ID: 00010 00101010
Multicast group: 11101111 00000010 00000010 00101010
239 2 2 42
Node IP address: 11000000 10101000 00000000 00000001
192 168 0 1
Subject-ID: 00010 00101010
Multicast group: 11101111 00101000 00000010 00101010
239 40 2 42
Additional background
Socket API demo
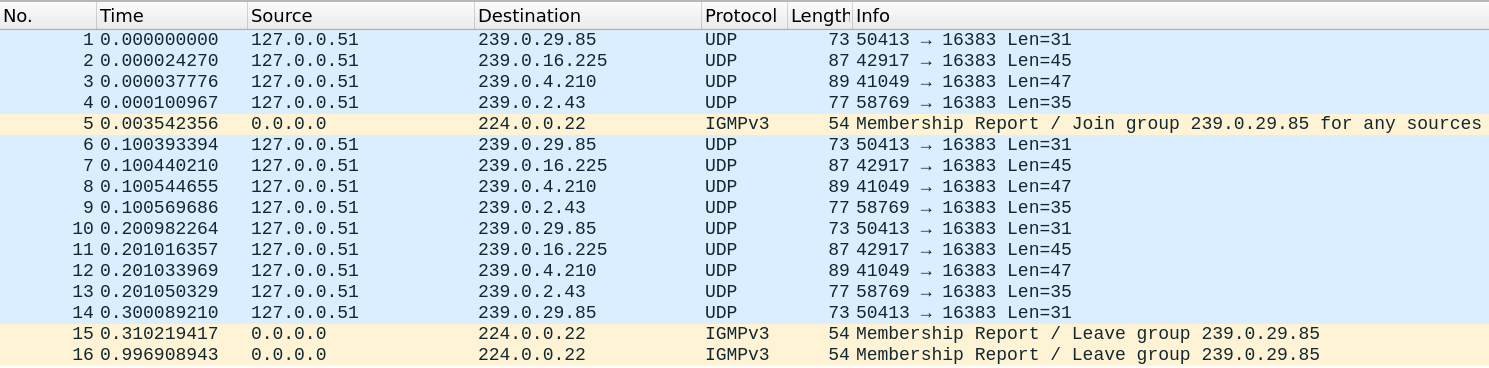
Here is a trivial send-receive demo used to test the Berkeley socket API:
#!/usr/bin/env python3
import socket
MULTICAST_GROUP = '239.1.1.1'
#IFACE = '127.1.23.123'
IFACE = '192.168.1.200'
sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM, socket.IPPROTO_UDP)
sock.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1)
# This is necessary on GNU/Linux, see https://habr.com/ru/post/141021/
sock.bind((MULTICAST_GROUP, 16384))
# Note that using INADDR_ANY in IP_ADD_MEMBERSHIP doesn't actually mean "any",
# it means "choose one automatically": https://tldp.org/HOWTO/Multicast-HOWTO-6.html
sock.setsockopt(socket.IPPROTO_IP, socket.IP_ADD_MEMBERSHIP,
socket.inet_aton(MULTICAST_GROUP) + socket.inet_aton(IFACE))
while 1:
print(sock.recvfrom(1024))
#!/usr/bin//env python3
import socket
#IFACE = '127.42.0.200'
IFACE = '192.168.1.200'
TTL = 16
"""
If not specified, defaults to 1 per RFC 1112.
"""
sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM, socket.IPPROTO_UDP)
sock.setsockopt(socket.IPPROTO_IP, socket.IP_MULTICAST_TTL, TTL)
# https://tldp.org/HOWTO/Multicast-HOWTO-6.html
# https://stackoverflow.com/a/26988214/1007777
sock.setsockopt(socket.IPPROTO_IP, socket.IP_MULTICAST_IF, socket.inet_aton(IFACE))
sock.bind((IFACE, 0))
sock.sendto(b'Hello world! 1', ('239.1.1.1', 16384))
sock.sendto(b'Hello world! 2', ('239.1.1.2', 16384))
 Assembling the packet, opening and closing the port is all fine. sigh Been banging my head on that one for a couple of weeks now, digging ever deeper into the APIs.
Assembling the packet, opening and closing the port is all fine. sigh Been banging my head on that one for a couple of weeks now, digging ever deeper into the APIs. (if you don’t count the WiFi AP)
(if you don’t count the WiFi AP)